Tras una larga espera, conseguimos una cámara RED KOMODO 6K gracias a AV Professional Vienna, uno de los principales lugares de alquiler de Austria, que nos la prestó. ¿Estás interesado en ver cómo le fue en nuestra prueba de laboratorio? Continúa leyendo…
EDITADO: en base a algunos de sus comentarios, me di cuenta de un error que cometí al decodificar los archivos REDCODE RAW en DaVinci Resolve: no los decodifiqué en la mejor calidad posible. Tengo una computadora nueva e instalé Resolve desde cero, donde la configuración predeterminada no es la más alta. Por lo tanto, todos los resultados de R3D HQ en el artículo original de ayer no reflejaban completamente la capacidad de la cámara. Como resultado, el rango dinámico en R3D HQ ahora es mejor en 12.5 paradas en SNR = 2. Los resultados de latitud permanecen casi sin cambios, eliminé los comentarios sobre el tinte verdoso, que ahora ya no está en los archivos R3D HQ. ¡Tengo que disculparme sinceramente por eso! Nuestro objetivo final es la transparencia total e incluye admitir errores si ocurren. Por lo tanto, revisa nuevamente los resultados de R3D HQ a continuación. Los resultados de ProRes 422 HQ permanecen como estaban.
Durante mucho tiempo estuve deseando tener en mis manos una cámara RED KOMODO 6K, ya que cuenta con un sensor de obturador global de 6K que es un poco más grande que el Super 35, y un rango dinámico de más de 16 paradas según el fabricante.
Respaldado por AV Professional Vienna

Cuando nuestros grandes amigos de AV Professional, una casa de alquiler de equipos de audio y video en Viena, nos dijeron que podían prestarnos una unidad, inmediatamente aprovechamos la oportunidad, ¡gracias! También debo decir que tienen muy buen café…

KOMODO – Una cámara con Obturador Global
Contar con un sensor de obturador global sin tener que sacrificar el rango dinámico suena como una afirmación muy impactante, y es una propuesta única en el panorama de las cámaras de cine que tienen un factor de forma pequeño.
Normalmente, comenzaríamos la prueba de laboratorio con las medidas del rolling shutter, pero en este caso no hay rolling shutter para medir: el sensor del obturador global logra leer todas las líneas a la vez. Solo por diversión lo probé con una luz estroboscópica de 300Hz y sí, no hay ningún rolling shutter visible.
Dentro de la impresionante lista de especificaciones, esta es probablemente la característica más importante de la RED KOMODO, ya que el obturador global brinda una sensación muy natural que me recuerda a la forma en que las cámaras de película representaban el movimiento en aquellos tiempos donde se utilizaba celuloide.
Configuración de la RED KOMODO 6K
Antes de realizar la prueba de rango dinámico y latitud con la RED KOMODO, realizamos una calibración del sensor después de aproximadamente 10 minutos de tiempo de ejecución. En el momento de la prueba, la versión de firmware era 1.3.1.

Si tienes curiosidad sobre cómo probamos el rango dinámico, puedes encontrar más información aquí.
Influencia del ISO – El siguiente paso fue establecer la influencia del ISO en las imágenes grabadas. RED no indica cuál es el ISO base o nativo del sensor. Con REDCODE RAW (R3D) puedes cambiar el ISO en la postproducción, pero esta opción no está disponible para ProRes 422. Lo primero que observamos es que la configuración ISO en la cámara cambiaría si los valores del código se ubicaran en el monitor de forma de onda (ISO más alto -> valores de luma más altos -> imagen más brillante), pero sin influenciar el recorte en la imagen. Por ejemplo, el primer parche recortado del diagrama de pasos XYLA21 permanecería recortado sin importar qué ISO se utilizara, y el segundo parche también permanecería por debajo del recorte.
Por lo tanto, para realizar nuestras pruebas utilizamos el ISO800.
Rango dinámico de la RED KOMODO 6K a ISO800 en ProRes 422 HQ
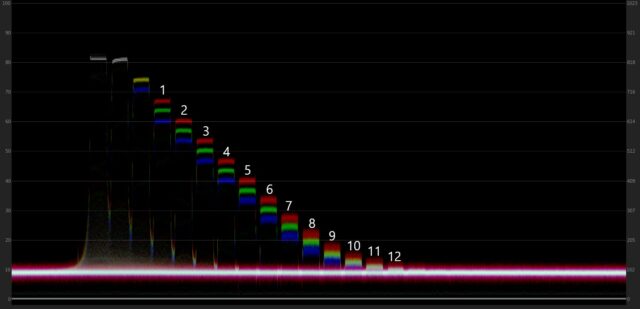
En ProRes 422 HQ, el sensor 6K se reduce a 4k DCI (4096×2160). Al analizar el diagrama de pasos de Xyla21 se revela un fenómeno interesante que solo se puede ver en un diagrama de forma de onda RGB:
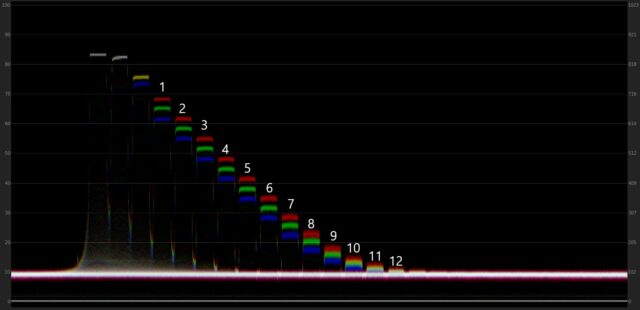
Tal como se puede ver en la imagen de arriba, si bajamos desde el primer parche recortado en el lateral izquierdo, el siguiente parche no muestra información RGB (pero no está recortado, ya que se puede mover ajustando la apertura del obturador/lente) sino que es solo gris, lo que indica que hay canales de color recortados. Al alcanzar el tercer parche, este muestra un color amarillo y uno azul, lo que indica que hay un canal de color rojo y verde recortado. El primer parche que no está recortado y tiene información RGB completa es el cuarto, que nombramos como el “1”.
Recuperación de las luces altas incorporada – En mi opinión, este fenómeno destinado a los archivos ProRes sugiere que la cámara cuenta con un algoritmo de “recuperación de luces altas” incorporado.
Parece funcionar de la siguiente manera: el valor de luma de un píxel se calcula sumando los valores individuales R, G y B con la fórmula: Y = 0.299R + 0.587G + 0.114B. Normalmente, el canal rojo se recortará primero, luego el canal verde y finalmente el canal azul (el azul se encuentra más de una parada debajo del canal rojo, tal como se puede ver en el gráfico de forma de onda RGB de arriba).
Utilizando la fórmula de luma anterior, los algoritmos inteligentes de recuperación de luces altas pueden estimar la cantidad de luma utilizando la información no recortada del canal azul y/o verde para reconstruir una señal prácticamente “no recortada”, aunque uno o dos canales de color ya hayan sido recortados. Puedes ver este estimación en funcionamiento con una pequeña irregularidad (brecha más grande) entre el tercer y cuarto parche contando desde la izquierda.
En esta reconstrucción, el segundo y tercer parche de la izquierda carecen de información de color (como veremos más abajo en la prueba de latitud). Por lo tanto, el cuarto parche desde la izquierda es el que tiene información a todo color, por lo que podría afirmarse que es la primera parada utilizable (nombrada como “1”).
De esta manera, del gráfico de forma de onda RGB podemos deducir que hay 12 paradas utilizables por encima del piso de ruido.
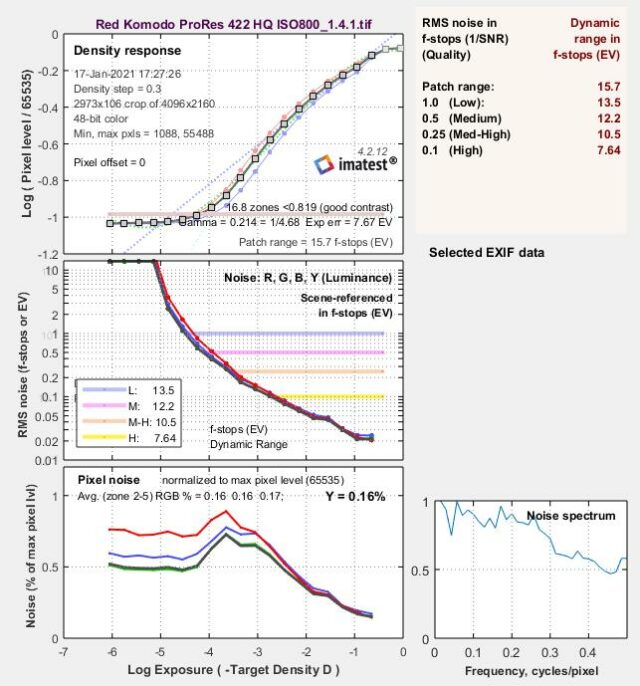
Independientemente de las consideraciones anteriores, IMATEST calculó 12,2 paradas de rango dinámico con una relación señal/ruido = 2, 13.5 con SNR = 1 para ProRes 422 HQ:
Revisé los gráficos de formas de onda de todas las cámaras que hemos probado, y ninguna de ellas tenía recuperación de luces altas incorporada. Aquí hay un ejemplo de la BMPCC6K en ProRes 422 HQ:
La segunda parada desde la izquierda tiene el canal rojo recortado, por lo tanto, podemos contar el tercer parche desde la izquierda como la primera parada utilizable, tal como hicimos en nuestra prueba de laboratorio de la BMPCC6K aquí. Por cierto, llegamos a obtener las mismas 12 paradas de rango dinámico. Grabar en BRAW en la BMPCC6K te brinda la opción de recuperar las luces altas en la postproducción (en DaVinci Resolve).
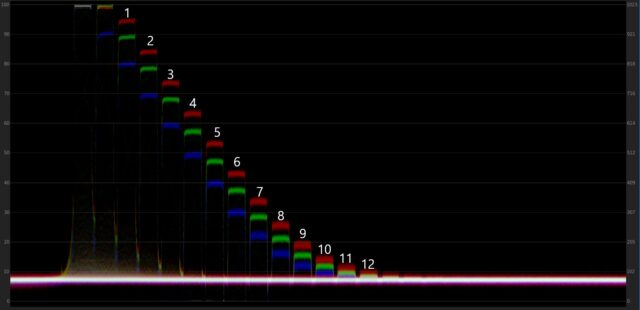
Rango dinámico de la RED KOMODO 6K a ISO800 en REDCODE RAW HQ
Al observar el gráfico de forma de onda RGB, se puede identificar un fenómeno muy similar (recuperación de luces altas) en los archivos R3D HQ de 6K (6144×3240):
Sigue habiendo alrededor de 12,5 paradas visibles sobre el piso de ruido.
IMATEST calculó 12,5 paradas en SNR = 2 y 13.6 paradas de rango dinámico en SNR = 1:
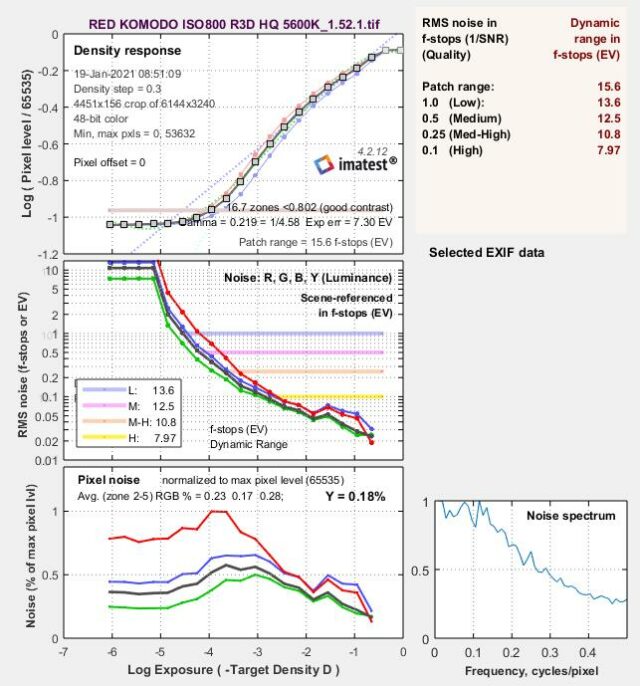
Los archivos R3D HQ RAW muestran resultados un poco más altos que los archivos ProRes 422 HQ incluso.
Nota: basándome en algunos pedidos de nuestros lectores, he testeado los archivos R3D HQ también en 3200k – el resultado es exactamente el mismo en IMATEST.
Estos resultados de rango dinámico son muy buenos para una cámara con obturador global, tanto en ProRes 422 HQ como en R3D como vienen de fábrica.
Prueba de latitud de la RED KOMODO 6K
La latitud es la capacidad de una cámara para retener colores y detalles cuando se sobreexpone o subexpone y se regresa al nivel de exposición base.
En la configuración de nuestro estudio, iluminamos la cara de nuestro sujeto (en este caso, mi colega Johnnie) con un valor de luma máximo del 60%. Esto da una exposición base de f4 a un ángulo de obturación de 360° a ISO800 (o f2.8 a 180°).
Anteriormente, solíamos subexponer sucesivamente la escena reduciendo el ángulo del obturador y luego regresábamos las imágenes a la exposición base.
Basándonos en las múltiples solicitudes de nuestros queridos lectores, hemos ampliado esta prueba para incluir también la sobreexposición.
Por lo tanto, aquí está nuestra nueva configuración de estudio, expuesta de tal manera que la cara de Johnnie muestra un valor de luma máximo del 60% (antes de la gradación) y luego se realizó una pequeña gradación:
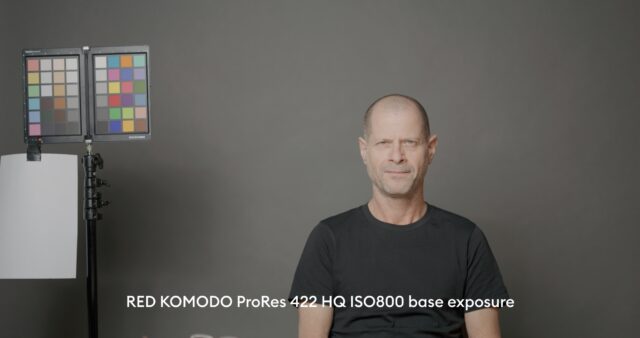
A partir de este valor, abrimos el iris del lente parada a parada hasta que la cara de Johnnie mostró un recorte. Además, subexpusimos la escena base al detener el lente/o aumentar el ángulo de obturación de 360° a 180°, 90°, 45°, 22.5° y 11.25°.
La prueba de latitud se realizó tanto en 4K DCI ProRes 422 HQ como en REDCODE RAW 6K HQ (R3D) a ISO800 para ver si hay diferencias.
Luego, en DaVinci Resolve (versión 17 Public Beta 6) regresamos las imágenes al valor de exposición base haciendo coincidir los gráficos de forma de onda tanto como sea posible.
Sobreexposición
Como se observa en la forma de onda RGB en la medición del rango dinámico, solo hay una parada (nombrada como “1”) por encima del valor de luma del 60% que contiene toda la información del canal de color RGB sin recorte, la siguiente parada por debajo tiene un recorte en el canal rojo. En la imagen a continuación podrán ver que la recuperación de luces altas incorporada no pudo recuperar la piel de Johnnie:

Ocurre exactamente lo mismo con los archivos R3D (no se muestran aquí). Tanto para ProRes como para R3D, el archivo de una sola parada está bien.
Subexposición
Las cosas se ponen interesantes al alcanzar las 5 paradas de subexposición devueltas a la exposición base (en REDCODE RAW esto es bastante simple, solo debes ajustar el control deslizante de exposición en la pestaña RAW en DaVinci Resolve. En ProRes 422 HQ, se utilizaron los controles de lift, gamma y ganancia).
Sorprendentemente, el ProRes 422 HQ se comporta mejor en la prueba de subexposición que el REDCODE RAW 6K, podrás observarlo las dos imágenes a continuación:
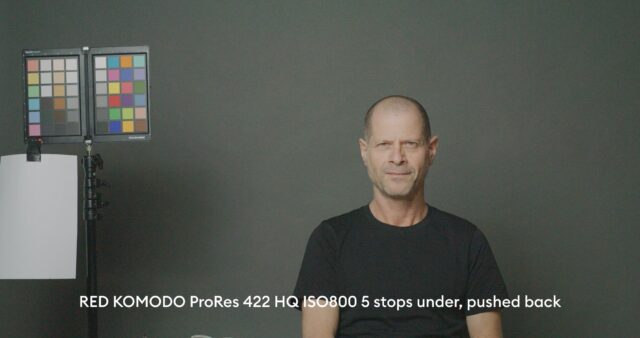
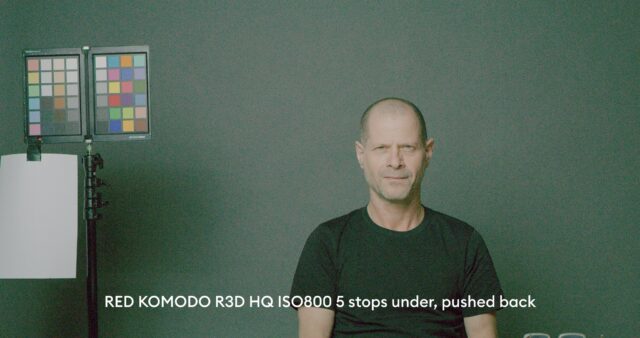
Ambos archivos muestran ruido, pero es un ruido muy fino y granulado que se puede eliminar fácilmente mediante la reducción de ruido en post-producción (si es necesario).
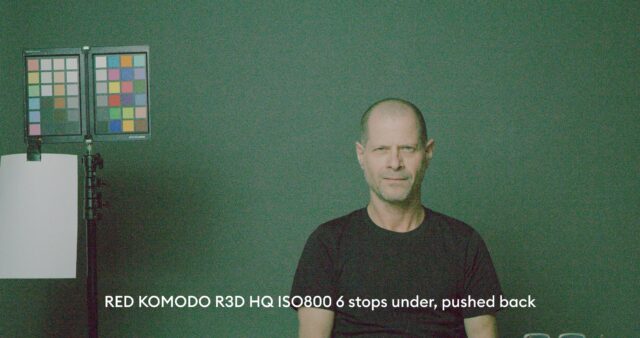
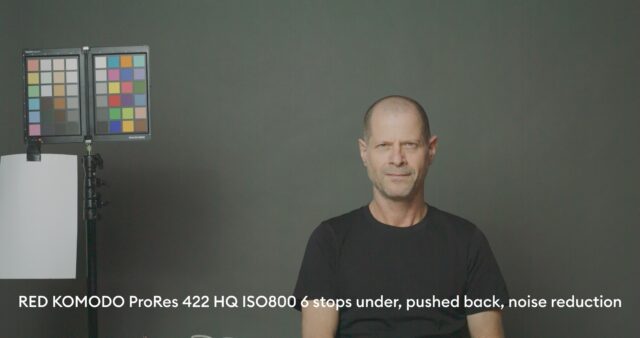
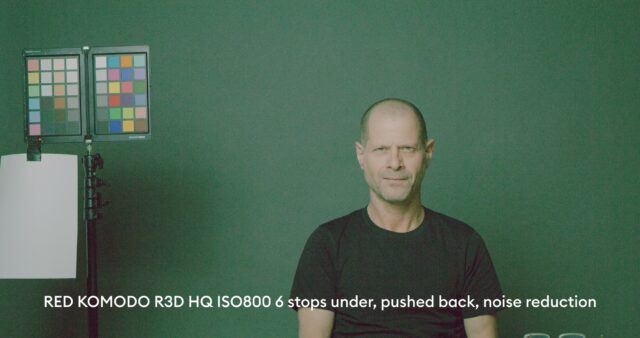
Al alcanzar las 6 paradas de subexposición y regresarlas a cero, las cosas se ponen realmente interesantes y se alcanza el límite. Nuevamente, puedes observar las imágenes en ProRes 422 HQ y R3D HQ a continuación:
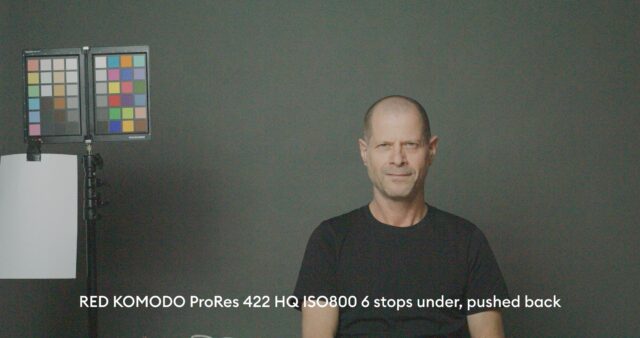
Una vez más, el ProRes 422 HQ conserva los colores mejor que la imagen en R3D HQ. El ruido en ambas imágenes alcanzó un punto en el que se debe utilizar una reducción de ruido adicional en la postproducción. Los archivos ProRes 422 HQ aún se pueden utilizar, pero se pueden ver rayas verticales en la imagen. Además, al mirar la camisa de Johnnie, se hacen visibles manchas más grandes de bloques de ruido cromático que no se pueden eliminar de manera efectiva:
Nuevamente, los archivos R3D HQ RAW muestran aún más ruido, y resulta muy difícil eliminar el ruido de manera efectiva en la postproducción sin sacrificar los detalles (utilizando la reducción de ruido temporal y espacial en DaVinci Resolve):
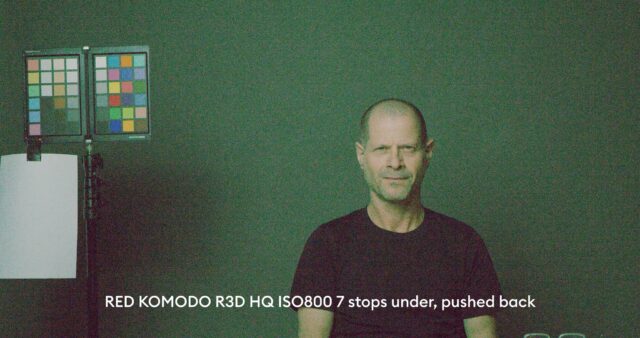
En mi opinión, las 6 paradas en R3D HQ se encuentran al límite de ser utilizable, la imagen en ProRes 422 HQ es un poco mejor. De todos modos, se han alcanzado los límites de la recuperación.
Solo para que conste, aquí hay una imagen en R3D HQ con 7 paradas subexpuestas y regresadas a la exposición base, sin reducción de ruido:
Resumen sobre la latitud
En pocas palabras, en la RED KOMODO 6K hay aproximadamente 7 paradas de latitud disponibles (una arriba, 6 abajo). Es un poco peor que el resultado de la BMPCC6K que puede soportar casi 4 paradas de sobreexposición y 4 paradas de subexposición. Además, estas cámaras distribuyen las paradas de forma muy diferente.
Trabajar con los archivos 6K REDCODE RAW R3D HQ en Resolve
Actualmente estoy probando la nueva NVIDIA RTX3090 en nuestro nuevo equipo (Ryzen 3900x, 32GB RAM, 1TB SSD). La tarjeta es un préstamo por parte de NVIDIA, ¡muchas gracias! Trabajar con la RTX3090 en Resolve es muy sencillo.
Solo a modo de referencia: sin reducción de ruido, en una línea de tiempo de 3840×2160 obtuve una reproducción suave al 20% de carga de la GPU (uso de memoria de 5.1 GB) con los archivos 6K R3D HQ RAW. La reproducción cae del objetivo de 25fps a 23fps al añadir reducción de ruido: umbral temporal (3 cuadros más rápido/pequeños), umbral 40, umbral espacial (más rápido/medio), umbral 18 – la carga de la GPU aumenta al 75% y el uso de la memoria a 6GB.
En los próximos meses escribiré un artículo sobre este tema, una vez que haya recopilado imágenes de diferentes cámaras.
Resumen
En cuanto a los resultados del rango dinámico, la RED KOMODO 6K se encuentra en un nivel similar al de la BMPCC6K. Es un poco más alto en ProRes 422 HQ, pero es ligeramente inferior en R3D HQ en comparación con BRAW 3:1 (en la BMPCC6K).
La prueba de latitud de la RED KOMODO 6K muestra aproximadamente 7 paradas de latitud, lo que es un muy buen resultado, y es similar a la Sony a7S III full-frame que hemos probado aquí. Las otras dos cámaras con sensor S35, la BMPCC6K y la Canon C300 MK III que hemos probado recientemente, logran alcanzar casi 8 paradas de exposición de latitud. Otras cámaras full-frame que alcanzan casi 8 paradas de latitud de exposición son la Panasonic S5 (prueba de laboratorio aquí) y la Canon C500 MK II (prueba de laboratorio aquí).
En general, fueron muy buenos resultados para la RED KOMODO 6K que presentó su tecnología única con un sensor de obturador global.
¿Has probado la RED KOMODO 6K? ¿Cómo fueron tus experiencias? Por favor cuéntanos en los comentarios a continuación.


![Prueba de Laboratorio de la RED V-RAPTOR [X] 8K VV - Rango dinámico y latitud de exposición](https://www.cined.com/content/uploads/2024/03/Thumbnail_2.1.1-370x230.jpg)
































