![Prueba de Laboratorio de la RED V-RAPTOR [X] 8K VV - Rango dinámico y latitud de exposición](https://www.cined.com/content/uploads/2024/03/Thumbnail_2.1.1-1300x750.jpg)
Llegados a este punto, debo preguntar: ¿hemos entrado en una nueva era de sensores global shutter? Después de realizar la prueba de la Sony a9 III, recibimos a la nueva RED V-RAPTOR [X] 8K VV en nuestro laboratorio CineD. Como utiliza un nuevo sensor global shutter Vista Vision de 8K, teníamos curiosidad por ver cómo le iba en la prueba, ¿tú también quieres saberlo? Entonces sigue leyendo…
No hace mucho tiempo atrás, probamos la RED V-RAPTOR 8K VV basada en el sensor CMOS; En caso de que te lo perdieras, puedes leer nuestra prueba de laboratorio aquí. Funcionó muy bien en el laboratorio y, con justa razón, se ubica entre las 5 mejores cámaras que probamos hasta ahora en términos de rango dinámico. Ahora, este modelo recibió una actualización del sensor a un nuevo sensor full-frame global shutter de 8K. Puedes leer sobre todas las especificaciones y nuevas características aquí.
Recientemente, escribí lo siguiente sobre la nueva Sony a9 III que también recibió un nuevo sensor global shutter de 6K: “Los sensores global shutter han existido por un tiempo, pero hasta hoy se han visto obstaculizados por el hecho de que el rango dinámico era significativamente menor que lo que mostraron sus homólogos CMOS. RED fue la primera empresa que pareció haber roto este paradigma con su cámara con global shutter RED KOMODO 6K (consulta nuestra prueba de laboratorio aquí), que dio buenos resultados en nuestras pruebas de rango dinámico”.
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/V-Raptor-X-still_1.17.1-900x506.jpg)
La Sony a9 III ya mostró el potencial de los sensores global shutter al exhibir los mejores resultados que cualquier cámara Sony Alpha haya brindado. ¿Será este el caso con la nueva RAPTOR [X] 8K VV?
Si no estás familiarizado con cómo probamos el rango dinámico, te sugiero que leas este artículo antes de seguir. Además, quiero agradecerle a mi querido colega Florian que me ayudó a realizar esta prueba.
Por razones obvias falta la medida del rolling shutter. Por curiosidad, verificamos el sensor usando nuestra luz estroboscópica de 300Hz y, como era de esperar, no se mostró nada más que un plano iluminado uniformemente, ¡como debería ser!
Rango dinámico de la RED V-RAPTOR [X] 8K VV
Para ser completamente transparentes desde el principio: no probamos la nueva función “Extended Highlight” que se supone que agrega 3 paradas adicionales de rango dinámico, ya que todavía está en modo beta. Parece estar basada en dos fotogramas sucesivos (como los que también ofrecen las Z-CAM, por ejemplo) con una imagen con una velocidad de obturación normal y una velocidad de obturación 8 veces mayor fusionadas en un solo fotograma. Para las escenas en movimiento, esto tiene el potencial de mostrar artefactos como imágenes fantasma, tal como revelaron las primeras imágenes.
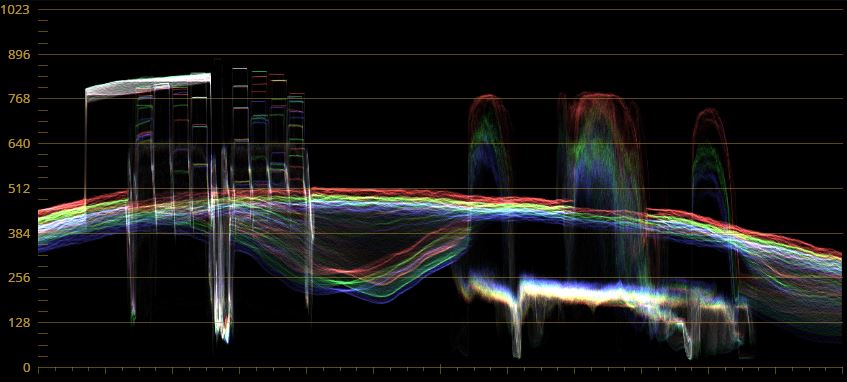
RED no proporciona un ISO “nativo” del sensor, y en REDCODE RAW ISO éste se puede cambiar en la postproducción. Es por ello que utilizamos un ISO800 como término medio para fotografiar nuestro gráfico Xyla21 (la versión del firmware es 1.7). Aquí hay un gráfico de forma de onda en 8K DCI R3D HQ para 25 cuadros por segundo. He ampliado las curvas RGB hacia 5600K usando el control deslizante de balance de blancos para mostrar cómo funciona un fenómeno específico de RED que se llama “recuperación de luces”, integrado de forma predeterminada en la ciencia del color IPP2 (REDWideGamutRGB, Log3G10):
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Waveform-Raptor-X-ISO800-5600K_with-stops.jpg)
Se pueden identificar unas 13 paradas por encima del nivel de ruido. Sólo un recordatorio rápido: el rango dinámico es una proporción, no un número absoluto. Por lo tanto, si vamos desde el primer parche de la izquierda (que está completamente recortado), hay un segundo parche (blanco) que ha sido reconstruido por la “recuperación de luces” incorporada, pero esta parada no contiene ninguna información cromática, solo luma (no se pueden ver valores RGB individuales). Así, el primer parche que contiene información cromática es el tercer parche desde la izquierda; este es el primero en el que no se produce ningún recorte. Ahora, de este parche al siguiente (el 4to, de ahí la proporción del 3ero al 4to) es nuestra primera parada, luego viene la siguiente parada, y así sucesivamente. Finalmente, llegamos a la última parada donde aún sobresale un poco del ruido de fondo: 13 paradas. Incluso se puede ver una parada 14 y un indicio de una 15 dentro del piso de ruido.
Hasta ahora, todo bien. Ahora echémosle un vistazo al resultado IMATEST:
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Raptor-X-ISO800-R3D_1.25.3_Step_2.jpg)
IMATEST calculó 12.8 paradas con una relación señal-ruido (SNR) de 2 y 14.5 paradas con SNR = 1. Este es un resultado realmente bueno pero, como se mencionó antes, también incluye la parada recuperada.
Balance de blancos: solo un comentario rápido, porque muchos lectores preguntaron esto cuando hicimos la última prueba de la V-RAPTOR 8K VV. El gráfico Xyla es independiente del balance de blancos utilizado en la cámara. Les preguntamos a nuestros contactos en RED y la respuesta fue: “Los sistemas de cámara no utilizan ganancias de sensores analógicos discretos para diferentes balances de blancos para preservar la flexibilidad de los datos sin procesar del sensor. Para aclarar aún más, esto significa funcionalmente que capturar un clip a 2800K y llevarlo a 5600K en la postproducción generará exactamente la misma imagen que si la cámara estuviera configurada en 5600K en el momento de la captura”.
Además, cuando probamos la ARRI ALEXA 35, verificamos EI400, 1600 y 3200 e IMATEST siempre mostró exactamente los mismos resultados, ya que diferentes valores de EI o ISO para ese caso se mueven alrededor de los valores del código a niveles de luma más altos o más bajos. Independientemente del valor EI, el sensor recortará en una combinación de la F-stop del lente y el valor del obturador.
La RAPTOR [X] muestra un comportamiento similar pero no es tan consistente en todo el rango de valores ISO, tal como reveló una verificación rápida de ISO6400: el rango dinámico cae a 12.2 y 13.7 paradas en (SNR = 2/1).
Una vez más: hasta el momento, todo bien. Ahora, echémosle un vistazo a la latitud de exposición.
Latitud de exposición de la RED V-RAPTOR [X] 8K VV a ISO800
La latitud es la capacidad de una cámara para retener detalles y colores cuando se sobreexpone o subexpone y se vuelve a la exposición base. Hace tiempo, elegimos un valor arbitrario del 60% del valor de luma (en la forma de onda) para los rostros de nuestros sujetos (en realidad, su frente) en nuestra escena de estudio estándar. Esta exposición base de CineD ayudará a nuestros lectores a obtener un punto de referencia para todas las cámaras que probamos, independientemente de cómo se distribuyan los valores del código y qué modo LOG se utilice.
Nuevamente utilizamos 8K DCI 25fps R3D HQ en ISO800, nuestro confiable Zeiss Compact Prime 85mm T1.5, y para que tengas de referencia aquí están las configuraciones de desarrollo en DaVinci Resolve 18.6.5:
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/DaVinci-R3D-settings-900x231.jpg)
Probé dos formas de llevar los archivos R3D al espacio REC709:
a) usando una transformación del espacio de color (CST) de R3D a la gama intermedia/amplia de DaVinci, ajustando la exposición y luego usando otro nodo CST para REC709 al final y b) simplemente agregando un nodo con un LUT (RWG_Log3G10_to_Rec709_BT1886_with_LOW_CONTRAST_and_r_3_Soft_size_33).
Curiosamente, el uso del CST en canales de subexposición masiva comenzó a recortarse a negro. No ocurre lo mismo con el enfoque LUT. Entonces se usó b), y todos los ajustes de exposición se realizaron usando el control deslizante de exposición en la pestaña Camera Raw, así como los controles de lift, gamma y ganancia en DVR (en el primer nodo, LUT en el último nodo).
Aquí está la exposición base, teniendo como modelo a mi querido colega Johnnie:
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Raptor-X-base-exp_1.4.1-900x506.jpg)
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/ungraded-waveform-base-exposure.jpg)
A partir de aquí, se pueden alcanzar hasta 2 paradas de sobreexposición antes de que la frente de la piel de Johnnie comience a recortarse, utilizando el sistema de exposición de semáforo basado en RAW de la RAPTOR [X] (quitando la hoja de papel blanca rápidamente). Desafortunadamente no son muy precisos, ya que la imagen a continuación, regresada a la exposición base, revela áreas en la cabeza de Johnnie que ya están ligeramente recortadas. Puedes ver cómo funciona la recuperación de luces aquí – la información de color se pierde, pero los detalles de luma siguen ahí:
![Lab Test RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Raptor-X-2-over_1.2.1-900x506.jpg)
La forma de onda RGB revela un canal rojo aplanado en la frente de Johnnie. Mi preferencia personal aquí sería tener la opción de recuperación de luces en la postproducción, como es el caso de las cámaras Blackmagic (cuando uso BRAW). Me resultó difícil exponer correctamente la frente para que estuviera justo a punto de recortar el canal rojo. La mejor manera sigue siendo aplicar una forma de onda RGB para ver dónde comienzan a alinearse los canales RGB, lo que conduce a un blanco puro que luego revela la recuperación de luces.
En este punto, comenzamos a subexponer la imagen cerrando primero el iris de nuestro lente CP2 y luego duplicando el valor del obturador.
A 5 paradas por debajo de la exposición base comienza a aparecer el ruido, pero es muy fino. A 6 paradas de subexposición la imagen se ve de esta manera, que es bastante aceptable incluso sin aplicar la reducción de ruido:
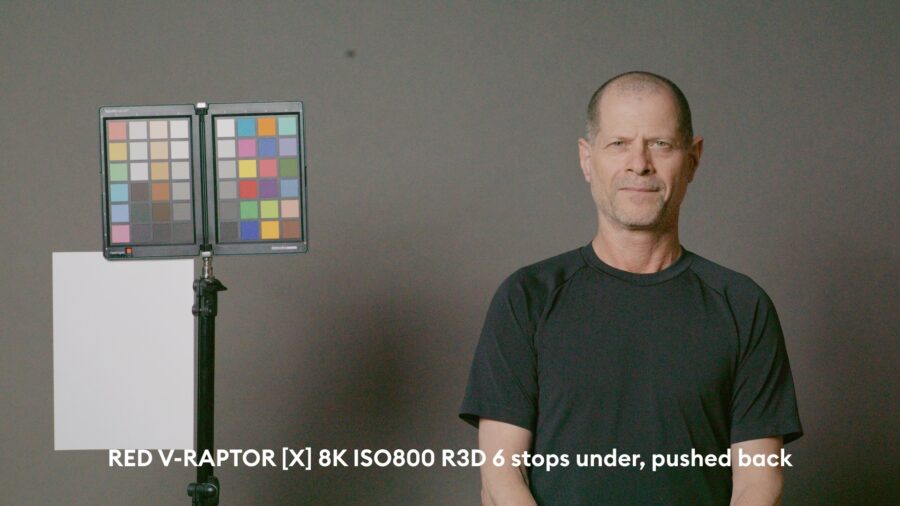
¡Se ve muy bien y ya estamos a 8 paradas de latitud de exposición!
Ahora veamos qué ocurre al alcanzar las 9 paradas de latitud, 7 paradas por debajo de la base regresadas a cero:

Bueno, es necesario aplicar algo de reducción de ruido ya que la imagen comienza a corromperse en las sombras. Además, aparece un tinte verdoso en las áreas de sombra:

Considero que la imagen aún es aceptable, pero está llegando a sus límites. En este punto, mi criterio es observar si es posible recuperar el color de la piel del sujeto en el lado oscuro del rostro. En la imagen de arriba podrás ver que el lado oscuro todavía se ve bien.
Veamos qué ocurre cuando alcanzamos las 10 paradas de latitud de exposición. Este es el nivel que alcanzó la ARRI Alexa Mini LF. A 8 paradas de subexposición, regresadas a la exposición base, obtuvimos esta imagen::
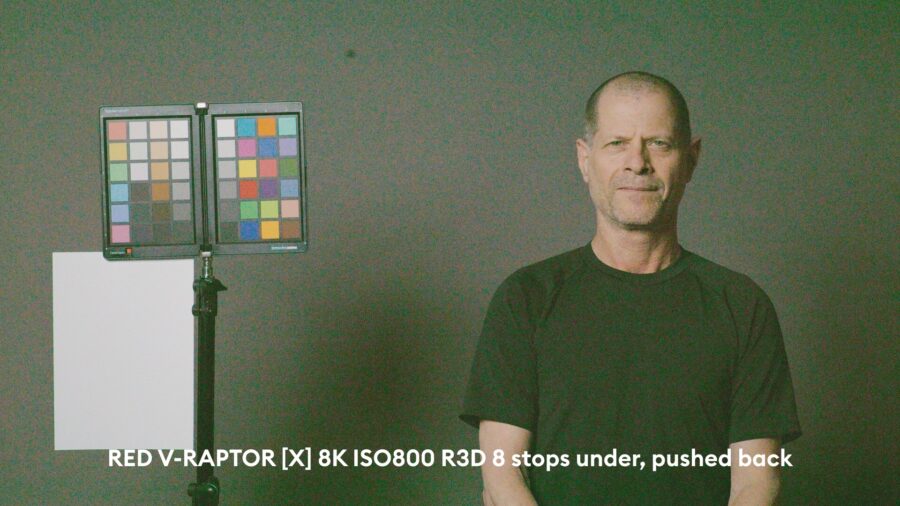
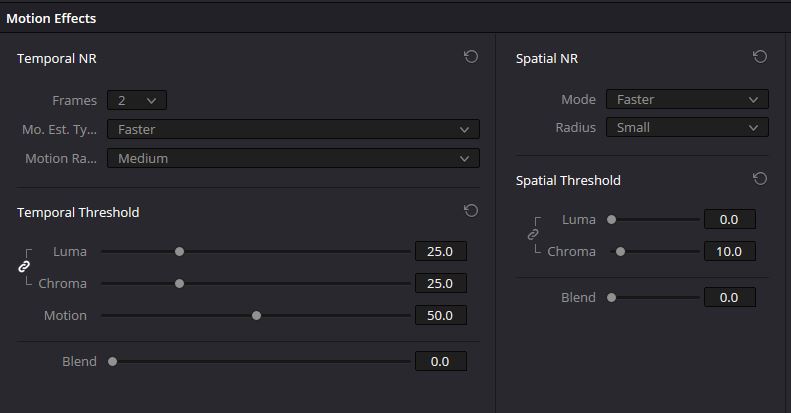
El ruido ha aparecido por todas partes, pero sigue siendo bastante fino. No hay líneas horizontales ni verticales. ¡Es muy impresionante! Sin embargo, hay un tinte verdoso en toda la imagen (se ve en el gráfico de forma de onda RGB a continuación), y el tono de piel en el lado oscuro de la cara de Johnnie no se puede recuperar incluso con una fuerte reducción de ruido temporal y espacial:
![RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Raptor-X-8-under-NR_1.15.1-900x506.jpg)
![RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Raptor-X-8-under-RGB-waveform.jpg)
![RED V-RAPTOR [X] 8K VV](https://www.cined.com/content/uploads/2024/03/Raptor-X-NR-settings-8-under-pb.jpg)
En este punto debo decir que llegamos al fin del juego. Esto me lleva a la siguiente conclusión: la RED V-RAPTOR [X] 8K VV basada en sensor global shutter es capaz de alcanzar una latitud de exposición sólida de 9 paradas, con algo de espacio hacia la parada 10. ¡Es el mismo resultado que obtuvimos con la RED V-RAPTOR 8K VV basada en el sensor CMOS!
La única diferencia entre las dos es el hecho de que la RAPTOR [X] se vuelve verdosa en las áreas subexpuestas, mientras que la V-RAPTOR VV se vuelve rosada en las áreas subexpuestas.
Comparándola con la Sony A9 III que hemos probado recientemente, que también es capaz de alcanzar 9 paradas de latitud de exposición con su global shutter de 6K, la V-RAPTOR [X] de 8K exhibe una latitud similar pero muestra cambios de color hacia el verde. Sin embargo, la riqueza de los colores es mejor con REDCODE RAW, ya que los colores pierden rápidamente la saturación en las áreas subexpuestas con la Sony A9 III.
La ARRI ALEXA Mini LF full-frame es capaz de alcanzar una parada más de latitud de exposición (5 por encima y 5 por debajo), y la reina de la prueba de CineD Lab es la ARRI 35 basada en sensor S35 que exhibió 12 paradas de latitud de exposición.
Resumen
El sensor global shutter de la V-RAPTOR [X] mostró un resultado realmente sólido en nuestra prueba de laboratorio. En comparación con la V-RAPTOR 8K VV anterior basada en un sensor CMOS, demuestra (nuevamente) que los sensores global shutter recientes ya no se ven obstaculizados por ninguna pérdida de rango dinámico y tienen la gran ventaja de eliminar cualquier sesgo de imagen debido a los efectos del rolling shutter.
¡Es un resultado más que impresionante!
¿Qué opinas de este nuevo modelo y de los resultados de nuestra prueba? ¿Ya has trabajado con la RED RAPTOR [X]? Cuéntanos qué opinas en los comentarios a continuación.
![Lanzan el Firmware 1.7.2 beta de la RED V-RAPTOR y la V-RAPTOR [X]](https://www.cined.com/content/uploads/2024/03/RED-V-RAPTOR-Firmware-1.7.2beta-featured-370x230.jpeg)







































